Hydra
Incrementally build 3D Dynamic Scene Graphs (DSGs) in real-time
Incrementally build 3D Dynamic Scene Graphs (DSGs) in real-time
A System for Distributed Multi-Robot Metric-Semantic Simultaneous Localization and Mapping
Robust multi-robot Lidar-base SLAM System designed for Team CoSTAR for the DARPA Subterranean Challenge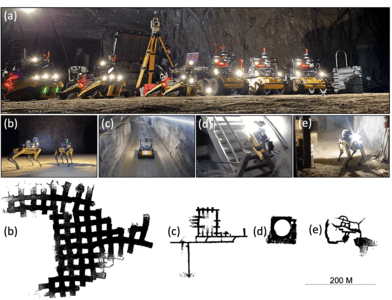
Robust Lidar Odometry System designed for Team CoSTAR for the DARPA Subterranean Challenge